
równia pochyła o zmiennym kącie nachylenia sonda położenia (ultradźwiękowa) wózek o różnej masie M (=0.49 +/- 0.05 kg), 2M i 3M program komputerowy Science Workshop
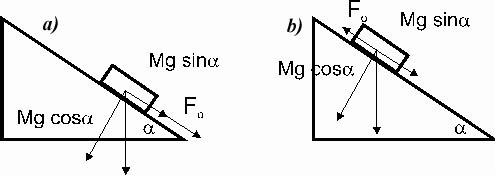
M a1=M g sin(alpha)+ Fo (wjeżdżanie) oraz M a2=M g sin(alpha) Fo (zjeżdżanie), gdzie:
a1,a2 przyspieszenia,Z eksperymentu możemy wyznaczyć przyspieszenia a1 i a2 co pozwala na określenie Fo ze wzoru:
g przyspieszenie ziemskie,
alpha kat nachylenia równi,
Fo - siła oporu.
Fo =M (a1-a2)/2.przy założeniu
Fo=mi M g cos(alpha), (gdzie mi - współczynnik tarcia)wyznaczamy
mi=(a1-a2)/(2 g cos(alpha)).Przeprowadzono kilka serii pomiarowych dla obu przypadków tarcia. Otrzymano następujące wyniki:
| a1 (m/s2) | a2 (m/s2) | Fo (N) | mi | |
| M | 0.74 | 0.65 | 0.022 | 0.0047 |
| 2M | 0.75 | 0.66 | 0.043 | 0.0047 |
| 3M | 0.76 | 0.67 | 0.067 | 0.0047 |
| a1(m/s2) | a2 (m/s2) | Fo(N) | mi | |
| M | 3.27 | 0.42 | 0.71 | 0.15 |
| 2M | 3.25 | 0.37 | 1.38 | 0.15 |
| 3M | 3.21 | 0.32 | 2.07 | 0.15 |
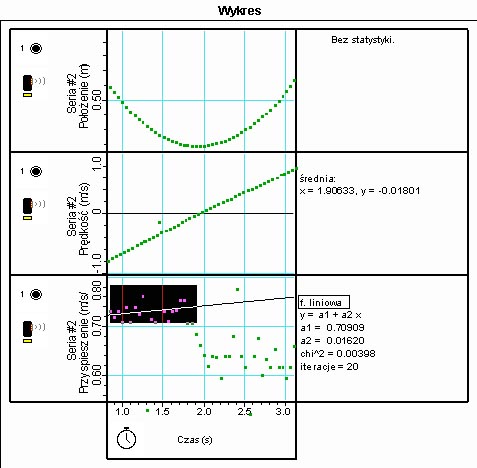
Poniżej znajduje się przykładowy zestaw wykresów obrazujący położenie, prędkość i przyspieszenie wózka na równi pochyłej. Na podstawie wykresu ( a(t) , gdzie t czas ruchu), można wywnioskować, że wartość opóźnienia jest większa w pierwszej fazie ruchu, na skutek działania siły tarcia oraz składowej siły ciężkości. W drugiej fazie ruchu następuje spadek przyspieszenia z analogicznych powodów. Różnice te są jednak nieznaczne, czego można się spodziewać biorąc pod uwagę stopień precyzji doświadczenia.
Na podstawie otrzymanych wyników pomiarowych można uznać, że współczynnik tarcia jest stały i w tego typu doświadczeniach nie zależy od prędkości.
Wykres 2. Tarcie toczne
Ft=M*g*sina,gdzie Ft siła tarcia statycznego. Zwiększano kąt nachylenia równi aż do momentu zaobserwowania ruchu klocka. Wyliczono siłę dla obu powierzchni trących. Wyniki wpisano do poniższej tabeli:
| powierzchnia | kąt a nachylenia równi | Ft(N) |
| z drewna | 10o | 5.87 |
| z materiału | 11o | 10.79 |