Zdjęcie układu pomiarowego
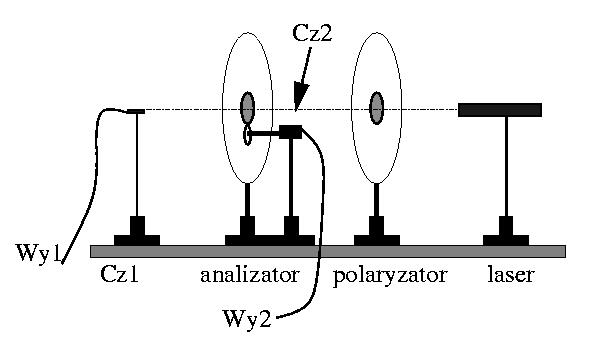
Schematyczny rysunek układu pomiarowego do sprawdzania prawa Malusa
Schematyczny rysunek układu pomiarowego do sprawdzania prawa Malusa
Układ pomiarowy przedstawiony jest na powyższym rysunku. Składa on się ze źródła światła w postaci lasera, analizatora i polaryzatora umieszczonego na ławie optycznej, czujnika światła Cz1 oraz czujnika kąta Cz2 który jest sprzężony z tarczą analizatora. Zakres pracy czujnika kąta pozwala na pomiar dwóch pełnych obrotów analizatora. Oba czujniki podłączone są do konsoli pomiarowej karty UIB.
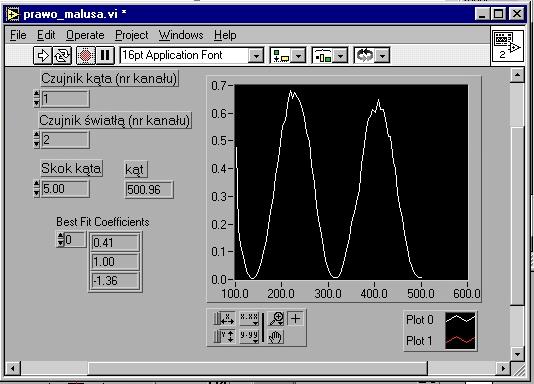
Pomiar wykonujemy przy pomocy programu "prawo_malusa.vi".
Po podłączeniu wyjścia Wy1 i Wy2 do konsoli pomiarowej określamy
w programie kanały do których są podłaczone czujnik kąta i światła, określamy
skok kąta wymuszający wykonanie następnego pomiaru (domyślnie 5o)
oraz określamy kąt maksymalny (domyślnie 500o). Ostatnia wartość
jest wartością progową i jej przekroczenie powoduje zatrzymanie programu.
Po uruchomieniu programu dokonujemy pomiaru zależności I(alpha)
zmieniając położenie analizatora od wartości minimalnej do maksymalnej.
Podczas wykonywania pomiaru należy uważać by nie przysłaniać wiązki światła
padającego na czujnik oraz by nie wprowadzać zbędnych drgań układu pomiarowego.
Przy ustawianiu układu należy zwrócić uwagę na możliwość "zatkania" czujnika
swiatła przez zbyt intensywną wiązkę światła. Otrzymane wyniki zapisujemy
do pliku w celu dalszej analizy. Program pomiarowy uwzględnia kalibracje
czujnika kąta i dane z tego czujnika zapisywane są jako wartości kąta.
Przykładowy wynik pomiaru przedstawia powyższy zrzut ekranu.
I(alpha)=I0Cos2(alpha)
Szkielet programu w Mathematic -e:
list= ReadList["sciezka_do_pliku\\nazwa_pliku",{Number,Number}] (*odzczyt danych z pliku*)pic1 = ListPlot[list] (* rysowanie wykresu*)<<Statistics\`NonlinearFit` (*ściągamy pakiet do dopasowania funkcji nieliniowych*)NonlinearFit[lista,postac_funkcji(x),x,{parametry_dopasowania_po_przecinkach}] (*znajdujemy dopasowanie*)pic2 = Plot[postac_funkcji,{x,zakres_dolny,zakres_górny}] (*rysujemy dopasowanie*)Show[pic1,pic2] (* dane pomiarowe i dopasowanie razem *)